Jardín, septiembre de 2024
Movimiento curvilíneo de partículas
1. 1.Vector de posición, velocidad y aceleración
Si una partícula se mueve sobre una curva, diferente a una recta, entonces describe un movimiento curvilíneo. Para definir la posición P, ocupada por la partícula en un tiempo determinado t, en un sistema x, y, z que se muestran en la figura a), y se dibuja el vector r que une al origen en O y el punto P. Como el vector r define la magnitud r y su dirección con respecto a los ejes referidos, éste vector r define la posición de la partícula con respecto a esos ejes; el vector r se conoce como el vector de posición de la partícula en el tiempo t.
Veamos el vector r’ que define la posición P’ ocupada por la partícula en un tiempo posterior t + Δt. El vector Δr que une a P y a P’ representa el cambio en el vector de posición durante el intervalo del tiempo Δt, pues, como se puede verificar en la figura a) el vector r’ se obtiene al sumar los vectores r y Δr. Δr representa un cambio de dirección y magnitud del vector r. La velocidad promedio de la partícula sobre este intervalo, se define como el cociente de Δr y Δt. Puesto que Δr es un vector y Δt es un escalar, el cociente de Δr/Δt es un vector unido a P, de la misma dirección que Δr y de magnitud igual a la magnitud de Δr dividida entre Δt. figura b)
La velocidad
instantánea de la partícula en el tiempo t se obtiene al elegir
intervalos de tiempo Δt cada vez más cortos y, de manera
correspondiente, incrementos vectoriales Δr cada vez menores. La
velocidad instantánea se representa en consecuencia mediante el vector:
v = dr/dt (1)

Figura 1
El ABS v del vector v se llama la rapidez de la partícula y se consigue al sustituir, en vez del vector r en la fórmula (1), la magnitud de este vector, representado por el segmento de línea recta PP’. La longitud del segmento PP’ es igual a Δs del arco PP’ en el límite, cuando Δt tienda a 0.
ABS(v)= ds/dt rapidez de la partícula = ds/dt (2)
Ahora, si el móvil se mueve a lo largo de una curva, la velocidad cambiara´ también, no sólo de rapidez, sino de dirección. La aceleración de la partícula no necesariamente, coincide con la dirección de la velocidad y por tanto no tiene porque tener la dirección de dr/dt = v

Figura
2. El vector aceleración, no necesariamente, tiene la dirección de dr/dt
Con un razonamiento similar al que utilizamos con la velocidad v
a = dv/dt (3)
Y en muchos casos es importante trabajar con ABS(a), sin que este valor tenga un nombre especial.
2. Derivadas de funciones vectoriales
Si P(u) es el vector de posición de una partícula en función de una variable u, que podría ser el tiempo t u otra.
Sabemos que ΔP = P (u + Δu) – P(u)
Y
dP/dt = Lim cuando Δu →0 de ΔP/Δu = Lim cuando Δu→0 de (P (u + Δu) – P(u)) /Δu (4)
Si P y Q son funciones de u
d (P + Q) /du = Lim cuando Δu→0 de Δ (P + Q) / Δu = Lim Δu→0 de (ΔP/Δu + ΔQ/Δu)
y por tanto:
d (P + Q)/du = dP/du + dQ/du) (5)
Si tenemos el vector fP, donde f es una función escalar de u y P una función vectorial de u

Sea el vector de posición P(t) = f(t) i + g(t) j + h(t) k = (f(t), g(t), h(t))
Derivemos el vector f(f) i
d f(t) i/ d(t) = f(t) d i/dt + if’(t) = f’(t) i ya que di/dt = 0 por ser i un vector constante, por lo que:
P’(t) = (f’(t), g’(t), h’(t)) y
P”(t) = (f”(t), g”(t), h”(t))
Si R(t) es el vector de posición de una partícula, R(t) = (f(t), g(t), h(t)), entonces:
R’(t) = (f’(t), g’(t), h’(t)) Es la velocidad de la partícula y tiene una dirección tangencial
R”(t) = (f”(t), g”(t), h”(t)) Es la aceleración de la partícula y no tiene la dirección de la velocidad o la tangente, tal como se indica en la figura 2.
Inclusive, es posible y eso lo veremos más adelante, descomponerla en una componente tangencial y otra radial; radial en la dirección del radio de curvatura, cuyo concepto también revisaremos.
Movimiento relativo a un sistema de
referencia en translación.

Si el punto A, centro del sistema que se traslada (En forma paralela a x, y, z) tiene vector de posición RA, el cual tiene velocidad y aceleración vA y aA. A su vez el punto B tiene dos vectores de posición, RB, respecto al eje fijo y RB/A, respecto al sistema que se está trasladando, se dan las siguientes ecuaciones:
RB = RA + RB/A
vB = vA + vB/A
aB = aA + aB/A
3. UNIDADES
Sistema Internacional de Unidades (unidades del SI).
En SI,
las unidades básicas son: longitud (m) metro, masa (kg) kilogramo y tiempo (t)
segundos. La unidad de fuerza es una unidad derivada. Se denomina newton (N)
y se define como la fuerza que produce una aceleración de 1 m/s2 a una masa de
1 kg
1 N = (1 kg) (1 m/s2) = 1 kg -m/s2
1kgf (fuerza) produce a un kg (masa), una aceleración de -9,8 m/s2 = g m/s2 g = -9,8 m/s2
En el sistema inglés:
Los matemáticos estadounidenses siguen utilizando de forma común longitud, fuerza y tiempo como lo medían los ingleses; estas unidades corresponden, respectivamente, al pie (ft), la libra (lb) y el segundo (s). El segundo es el mismo que la unidad correspondiente del SI. El pie se define como 0.3048 m. La libra se define como 0.453kg. (kg fuerza)
En este sistema, el valor normal de la gravedad es, g = 32,2 ft/s2. La unidad de masa consistente con el pie, la libra fuerza y el segundo es la masa, que recibe una aceleración de 1 ft/s2 , cuando se le aplica una fuerza de 1 lb
Esta
unidad, llamada en ocasiones un slug,
puede deducirse de la ecuación
F
= ma, después de sustituir
1lb = 1 Slug x 1pie/s2
1 Slug = 1 lb /(1 pie/s2) El slug es la unidad de masa en el sistema inglés. Cada que se escriba lb, se refiere a una libra fuerza.
Ejemplo 1
El automóvil A viaja hacia el oeste, con una rapidez constante de 36 km/h- Cuando el automóvil A cruza por la intersección, el automóvil B parte del reposo desde una distancia 35 m al norte y se mueve hacia el sur con una aceleración constante de 1,2 m/s2.
Determinar
la posición, velocidad y aceleración relativa de B respecto de A, 5 s después
que A pasa por la intersección.

Figura
ejercicio 1
Se eligen los ejes x e y con el origen en la intersección de las dos calles. El sistema x’ y’ no dibujado va con el carro A.
vA = 36 i km/h Constante vBt=0 = 0 aB = -1,2 j m/s2
vA = 36 i km/h = 10 m/s para tener unidades consistentes
aA vA xA en t = 0 ; en t = 5 aB vB yBt=0 yBt = 5
Movimiento del automóvil A. Trabajemos con el concepto escalar de rapidez
aA = 0 vA = 10 i m/s xA = (xA)o + vA t = 0 + 10t (m)
Para t = 5
aA = 0 vA = 10 i m/s xA = vA x5 = 50 i m
Movimiento del automóvil B
aB = -1,2 j m/s2 vB = (vB)o + at = 0 – 1,2t yB = (yB)o + (vB)ot + aBt2/2 = 35 – 0,6t2
Para t = 5
aB = -1,2 j m/s2 vB = 5(-1,2) = -6 j m/s yB = 35 – 0,6(25) = 20 j m ; todavía no llega al cruce.
Movimiento de B relativo a A
RB = RA + RB/A 20 j = 50 i + RB/A RB/A = 50 i – 20 j ABS RB/A = √(400 + 2500) =
53,9
α= tan-1 (-50/20) = -21,8014 deg
aB = aA + aB/A aB/A = aB + 0 = -1,2 j m/s2
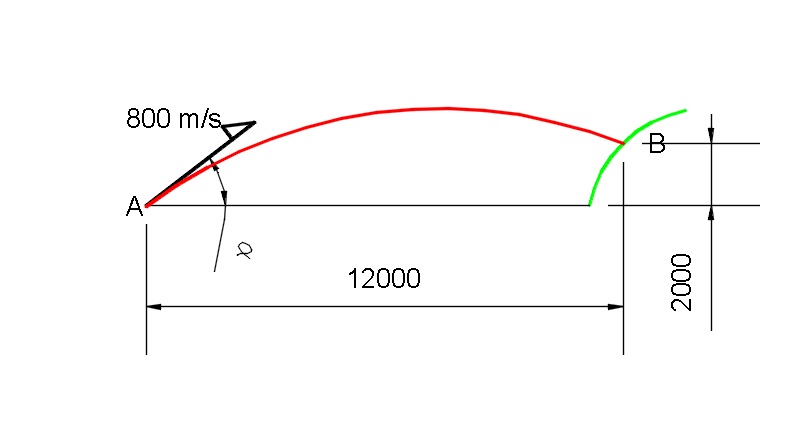
Ejercicio 2
Un proyectil se lanza con una velocidad inicial de 800 m/s, a un blanco ubicado a 2000 m de altura, por arriba del cañón y a una distancia horizontal de 12000 m. La resistencia del aire es despreciable. Calcular el valor del ángulo de disparo α.
El movimiento horizontal es uniforme ax = 0 vx= 800cosα Uniforme
x= vx t = (800 cosα)t
El tiempo que se requiere para que el proyectil recorre x = 12000 m t =12000/ (800 cosα) =15/cosα
El movimiento vertical tiene aceleración g. g = -9,8 m/s2
(vy)o = 800 senα
y = (vy)ot + gt2/2 = (800 senα)t -9,8t2/2 2000 = (800 senα)t – 4,9t2
2000 = (800 senα) (15/cosα) – 4,9 (15/cosα)2 = 12000 tanα - 1102,5 sec2α
Sec2α = 1 + tan2α
2000 = 12000 tanα - 1102,5 (1 + tan2α)
3102,5 = 12000 tanα - 1102,5 tan2α una ecuación de segundo grado para tanα
tanα1 = 0,264993 α1 = 14,84 deg
tan α2 = 10,619360 α2 = 84,62 deg
Con cualquiera de los dos ángulos, el proyectil da en el blanco.
4. Componentes tangencial y normal
Como se vio en la figura 2 del título 1, si en un punto dado y un tiempo dado t, la partícula cambia de rapidez y de dirección, la aceleración no es tangente a la curva descrita por R(t) y se puede descomponer en componentes x, y, z o simplemente x, y si se trata de una curva plana. Pero igualmente, en 2D o 3D, a(t) se puede descomponer en una componente tangencial y otra normal a la tangente.
Si una partícula se mueve sobre una curva (2D o 3D) con rapidez constante, la aceleración sólo tiene componente radial o normal.
En un punto dado de la curva P (x, y, z) o simplemente P (x, y) existen los vectores unitarios et tangencial y en, normal y un plano, llamado por los matemáticos: plano osculador, cuya normal es el producto vectorial
et vector unitario tangencial
en vector unitario normal
eb = et X en el vector unitario que define el plano osculador
Es demostrable y se encuentra en casi todos los libros de cálculo que:
en = det/dθ (1)
Las figuras, en la figura (4), ayudan a hacer las demostraciones correspondientes a et, en, v, a
En la primera hemos colocado

Figura 4
En la figura 1 de (4), colocamos los dos vectores unitarios et y e’t que forman el ángulo Δθ, en la (4) 2.
Siendo
unitarios, la curva que subtiende al vector Δet será una circunferencia de radio =1. ABS Δet =2sen(Δθ/2)
y Lim cuando Δθ→0 de Δet/Δθ será un vector perpendicular a et
y, teniendo en cuenta que:
Lim cuando Δθ→0 de sen(Δθ)/2) /(Δθ/2) = 1
Entonces Lim cuando Δθ→0, Lim de Δet/Δθ será un vector perpendicular a et = en y unitario
Y por tanto det/dθ = en que es la ecuación (1)
El vector velocidad v tiene la dirección de et y
en=det/dθ vector unitario normal
v = v et (2) v = ABS v = rapidez
Sabemos que:
a =dv/dt ; Recordemos que v = vet
a = dvet/dt = vdet /dt + et dv/dt (3)
det/dt = (det/dθ) (dθ/ds)(ds/dt)
Si s es el arco, entonces v = ds/dt y det/dθ = en
det/dt = ven /ρ (xx)
1/ρ= (dθ/ds) (yy)
det/dθ = en y 1/ρ= (dθ/ds)
Nota. Estas ecuaciones, (xx) y (yy), que vienen del cálculo diferencial e integral, ameritan una explicación adicional, que se hará en un próximo blog. Por hora, las utilizaremos, tanto en los conceptos faltantes, como en los ejercicios.
a = (dv/dt) et + (v2/ ρ) en (4)
at = dv/dt (5)
an = v2/ρ (6)
La fórmula (6) es una fórmula de la física elemental y describe la aceleración centrípeta de una partícula que se mueve sobre una circunferencia de radio ρ, con rapidez uniforme.
¿Qué es el radio de curvatura? En cada punto de una curva P(x, y, z) hay una curvatura k(t) y un radio de curvatura ρ (todavía no definidos)
1.El radio de curvatura ρ, en un punto en la curva es, a grandes rasgos, el radio del círculo que mejor se ajusta la curva es ese punto.
2.La curvatura,
denotada como k, es 1 dividido entre el radio de la curvatura ρ
Respecto de las dos proposiciones anteriores se discutirán brevemente
más adelante, aunque la posible respuesta, no es del todo satisfactoria.
5.Componente tangencial y normal es una curva 3D

Figura 5, tomada del libro
Mecánica de Beer and Johnston, Dinámica.
Movimiento
de una partícula en el espacio.
Las fórmulas (1) a (6) se cumplen también para una partícula que se mueve a lo largo de una curva en el espacio. Sin embargo, puesto que hay un número infinito de líneas rectas que son perpendiculares a la tangente en un punto dado P de una curva en el espacio, es necesario definir con más precisión la dirección del vector unitario en.
Se
considerarán de nuevo los vectores unitarios et y e’t,
tangentes a la trayectoria de la partícula en dos puntos vecinos P y P’ (figura 11.24a)
y el vector Δet que
representa la diferencia entre et
y e’t (figura
5-a). Imagine ahora un plano que pasa por P (figura 11.24a)
paralelo al plano definido por los vectores et, e’t y
Δet (figura 5-b). Este
plano contiene la tangente a la curva en P
y es paralelo a la tangente en P’.
Si se deja que P’ se acerque a P,
se obtiene en el límite el plano que mejor se ajuste a la curva en la vecindad
de P.
Este
plano recibe el nombre de plano
osculador en P. De esta
definición se deduce que el plano osculador contiene al vector unitario en, puesto que este vector representa
el límite del vector Δet/Δθ.
La
normal definida por en está
contenida en el plano osculador;
ésta recibe el nombre de normal principal en P. El vector unitario eb = et X en, que completa la tríada derecha et, en, eb (figura
5-c) define la binormal en P. En consecuencia, la binormal es
perpendicular al plano osculador.
Por
tanto, la aceleración de la partícula en P
puede descomponerse en dos componentes, una a lo largo de la tangente, y
la otra a lo largo de la normal principal en P. Hay que observar que la aceleración no tiene componente a lo
largo de la binormal.
Cuando se trabaja en el plano x, y el vector binormal es el eje z (vector k) y el plano osculador es el propio plano x, y.
Nota. Este Párrafo está tomado casi literalmente del libro de Mecánica de Beer, Johnston and Cornwell, 9ª edición,pag 667
6.Curvatura y radio de curvatura.
Sea una gráfica en 2D o en 3D.
Si R(t) =(f(t), g(t), h(t)) el vector posición de una partícula P, en términos del parámetro t, que podría ser el tiempo.
v(t) = R’(t) = (f’(t), g’(t), h’(t)) Velocidad tangencial de la partícula en P
a(t) = R”(t) = ((f”(t), g”(t), h”(t) Aceleració tangencial de la partícula en P
Históricamente, se ha definido la
curvatura para curvas 2D y 3D así:
k(t) = d (et)/ds (7)
Es la rata de variación del
vector unitario et (también
nominado T(t)) respecto de la
variación del arco. La curvatura escalar será:
ABS(kt) = k(t) > 0
Se define radio de curvatura como el inverso de k(t) ρ = 1/k(t) >0 (8)
En otro blog se ampliarán ambos conceptos, curvatura y radio de curvatura.
Las fórmulas que salen de estas definiciones son:
k(t) = ABS[R’(t)X R”(t)]/[ABS(R’(t)]3 = │R’(t)XR”(t)│/│R’(t)│3 (9)
y el radio de curvatura ρ = 1/k(t) (10)
Para una curva en x, y tenemos y = f(x)
La parametrisamos así: x = t y = f(t) R(t) = (t, f(t),0)
R’(t) = (1, f’(t), 0) Velocidad
R”(t) = (0, f”(t), 0) Aceleración
Encontramos el producto vectorial R’(t) X R”(t) = f”(t) k y │R’(t) X R”(t) │= f”(t)
Encontramos además, │R’(t)│ = √(1 + [f”(t)]2)
k = f”(t) / [√(1 + (f”(t))2]3 = f”(t) / [(1 + (f”(t))2]3/2 (11)
y recordando que x = t
k = f”(x) / [(1 + (f”(x))2]3/2 ρ = [(1 + (f”(x))2]3/2/ f”(x) (12)
Ejercicio 3
Un avión va en trayectoria horizontal a velocidad constante. En cierto punto comienza a descender en una trayectoria circular y conserva la velocidad tangencial. Los pilotos saben que, si llegan a obtener una aceleración de 5,5g (g = 9,8 m/s2) se desmayan. El radio de la circunferencia es 325 m (Como lo indica la figura).
a.A qué velocidad se desmaya el
piloto?
b. En otro caso similar, si el
piloto va con una velocidad de 150 m/s y desciende por una trayectoria
circular, manteniendo la velocidad de 150 m/s, cual será el radio, para que el
piloto se desmaye.

Figura ejercicio 3
a. Sabemos que, aunque el avión va con una velocidad constante, existe una aceleración normal, que le produce el cambio de dirección al avión. At = 0 y an = v2/r = 5,5g
v = √(5,5x9,8x325) = 132,42 m/s
b. Sabemos que, el avión lleva una velocidad tangencial constante igual a 150 m/s.
at = 0 y an = v2/r
r = v2/ an = (159)2/(5,5x9,8) = 417,01 m
Ejercicio 4
El automóvil mostrado en la figura, entra a la curva, en el punto O, a una velocidad tangencial desconocida y el conductor aplica allí, una aceleración tangencial de at =.-0,25m/s2, .Cuál es magnitud de la aceleración, en el punto A, de x = 200 m, si en ese punto lleva una velocidad tangencial de 10 m/s
La gráfica del ejercicio es:

Figura ejercicio 4
El cambio de dirección en la velocidad, implica la existencia de una aceleración normal, que será igual a an = v2/r = r = ρ: radio de curvatura en el punto indicado.
at = -0,25 m/s2 aceleración tangencial
El valor del radio de curvatura ρ = r = ((1+ (y’(x))2) 3/2) /y” (x) (1)
Para lo cual necesitamos y’ y y” de la función y = 100e x/500
y’ = (1/5) ex/500
y en x = 200 y’ = (1/5) e 200/500
y” = (1/2500) e x/500 y en x = 200 y" = (1/2500) e 200/500
Llevando estos valores a la fórmula (1) (de este ejercicio) r (200) = 1904,48 m
Ahora, la componente tangencial de la aceleración es igual at = -0,25 m/s2
La componente normal será: an = v2/r= (100m2/s2)/1904,48 m = 0,0525 m/s2
│a│=√(-0,25)2 + (0,0525)2) = 0,255 m/s2
Ejercicio 5
Tal como lo indica la figura del ejercicio, si el pasador sube, también sube la bolita que está en el canal. El pasador está subiendo desde el origen, a una velocidad constante de 3 m/s. Calcular la magnitud de la aceleración de la bolita, cuando la bolita está en x= 6

vy = 3 m/s Uniforme x e y son funciones del tiempo
x = y2/6 vx = dx/dt = (2y dy/dt) /6 = (1/3) ydy/dt = (1/3) y vx = y ya que vy = 3
Esto indica que las magnitudes de vy de y son iguales, cada una en las unidades consecuentes.
vx = y y=
√(6x) y cuando x = 6 y = 6
La velocidad vx = 6 m/s
La magnitud de la velocidad total será v = √ (32 + 62) = √45 = 3√5 m/s
La aceleración según x será: ax = dvx/dt = dy/dt = vy = 3 m/s2 la aceleración ay = 0
│a│ = √ (02 + 32) = 3 m/s2
Juan Fernando Sanín E
juanfernando.sanin@gmail.com
No hay comentarios:
Publicar un comentario